2026-04-30
В качестве основной полезной нагрузки для современной авиации, БПЛА и платформ, устанавливаемых на транспортные средства, подвесные системы эволюционировали от однофункциональных до многофункциональных интеграций и широко используются в разведке, целеуказании и инспекции. В условиях высокой динамичности, сильной вибрации и сложных электромагнитных помех подвесные системы предъявляют жесткие требования к точности измерения ориентации и позиционирования. Хотя традиционные волоконно-оптические или лазерные инерциальные навигационные системы обеспечивают высокую точность, они имеют такие ограничения, как большие размеры, высокая стоимость и ограниченная адаптивность к окружающей среде. В последние годы инерциальные навигационные системы на основе MEMS, благодаря своей легкости, низкой стоимости, высокой надежности и сильной адаптивности к окружающей среде, постепенно становятся предпочтительной технологией для навигации и управления ориентацией подвесных систем.
![[Kaituan·Chenguang] Углубленный анализ основных технологий инерциальной навигации MEMS в капсулах (2)](https://cdn.cnyandex.com/ii8rkyo/uploads/Kaituan·Chenguang-Углубленный-анализ-основных-технологий-инерциальной-навигации-MEMS-в-капсулах-2.png "[Kaituan·Chenguang] Углубленный анализ основных технологий инерциальной навигации MEMS в капсулах (2)")
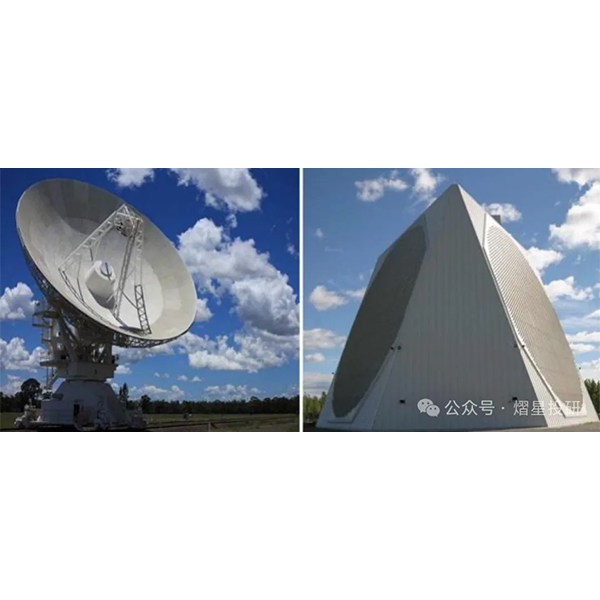
Типичные области применения подвесных контейнеров включают военную разведку, отслеживание целей, инспекцию линий электропередач и предотвращение лесных пожаров. Эти сценарии предъявляют чрезвычайно высокие требования к стабильности и точности наведения контейнеров. Контейнеры обычно устанавливаются на двухкоординатной стабилизирующей платформе, состоящей из кольца тангажа и кольца азимута. Гироскоп отслеживает возмущения несущей в инерциальном пространстве, выдавая сигнал напряжения для привода двигателя, который создает балансировочный момент, тем самым стабилизируя и отслеживая фотоэлектрический детектор или систему визуализации.
▍ ▉ Проблема ошибки рычага: Поскольку инерциальный измерительный блок (IMU) установлен на двухкоординатной стабилизированной платформе, а не закреплен на основном блоке, ошибка рычага определяется в системе координат IMU. Однако система координат IMU имеет две степени свободы вращения, в результате чего вектор рычага перестает быть постоянной величиной. Традиционные интегрированные навигационные фильтры Калмана с моделями ошибки рычага больше не применимы, и необходимо построить точную динамическую модель рычага.
▍ ▉ Требование к развязке рамы: Движение рамы контейнера (изменение тангажа и азимута) будет влиять на результаты измерений инерциального измерительного блока (IMU). Необходимо обеспечить динамическую изоляцию движения рамы контейнера, чтобы гарантировать сохранение высокой точности измерения ориентации даже в условиях сильных движений или вибрации несущего объекта.
▍ ▉Требования к долгосрочной надежности: инерциальные навигационные системы на основе MEMS-технологии полагаются на вычислительную навигацию, и ошибки накапливаются со временем. Во время длительных миссий на борту космического аппарата (например, 72 часа непрерывной работы) необходимо эффективно контролировать дрейф нулевых смещений гироскопа и акселерометра, чтобы предотвратить расхождение углов ориентации.
▍ ▉Требования к адаптации к окружающей среде: капсула должна работать в широком диапазоне температур от -40℃ до +85℃ и адаптироваться к различным экстремальным условиям, таким как пустыни, полярные регионы и море. Она также должна обладать виброустойчивостью и возможностью высокочастотного вывода данных для обеспечения быстрого реагирования и точного управления.
")
В сложных сценариях выполнения задач одного метода навигации часто недостаточно для обеспечения высокой точности на протяжении всего процесса. Инерциальная навигация на основе MEMS-технологии объединяет данные GNSS, визуальные данные, барометрические данные и другие данные с помощью многосенсорной архитектуры глубокого слияния для обеспечения надежной навигации в любых погодных условиях и на любой местности.
При наличии сигналов GNSS для повышения точности позиционирования и надежности системы используется тесно связанный интегрированный режим навигации;
В условиях отсутствия сигнала GNSS, используя данные визуальной/инерциальной одометрии или лазерного дальномера, определение местоположения цели осуществляется путем преобразования пространственных координат, а погрешность позиционирования может контролироваться в пределах 10 м.
Благодаря объединению высокочастотных инерциальных данных (например, выходных данных IMU с частотой 4000 Гц) для моделирования и компенсации движения в последовательности изображений, можно эффективно подавить размытие, вызванное дрожанием, что повышает удобство использования и точность распознавания разведывательных изображений.
")
При проектировании модульных систем выбор MEMS-IMU напрямую влияет на общую производительность и возможности выполнения задач. Выбор должен основываться на реальном сценарии применения модуля, с учетом следующих ключевых параметров.
▍ ▉ Показатели точности и производительности: ключевыми являются точность определения ориентации, точность определения положения, стабильность при нулевом смещении и полоса пропускания. Например, в разведывательных модулях приоритет отдается долговременной скорости дрейфа, в то время как в промышленном инспекционном оборудовании больше внимания уделяется точности кратковременной стабильности. Полоса пропускания в 400 Гц необходима для своевременного реагирования на изменения ориентации модуля. Кроме того, уровни производительности гироскопов и акселерометров инерциального измерительного блока (IMU) оцениваются комплексно в зависимости от продолжительности миссии (например, кратковременные маневры или длительные перелеты) и от того, используется ли помощь GNSS.
▍ ▉ Адаптируемость к окружающей среде и надежность: Модули работают в суровых условиях, требуя от инерциальных измерительных блоков (IMU) чрезвычайно высокой вибро- и ударопрочности, а также стабильности в широком диапазоне температур. Например, модули, устанавливаемые на транспортные средства, должны выдерживать перепады температур от -40°C до +85°C и постоянные дорожные вибрации; модули для самолетов должны выдерживать низкие температуры на большой высоте и большие нагрузки от транспортных средств. При выборе модуля следует обращать внимание на конструкцию системы гашения вибраций, степень защиты и проверенную модель компенсации в широком диапазоне температур.
▍ ▉Системная интеграция и совместимость интерфейсов: Размеры, вес и энергопотребление инерциального измерительного блока (IMU) должны соответствовать компактным размерам и энергопотреблению модуля. Одновременно с этим, его интерфейсные протоколы (такие как CAN, RS-422, SPI) должны обеспечивать бесперебойное подключение к шине управления модуля, поддерживая высокочастотный вывод данных (например, ≥400 Гц) для удовлетворения требований к управлению в быстром и стабильном контуре. Кроме того, поддержка расширенных функций, таких как онлайн-калибровка и передача выравнивания, также является важным фактором повышения общей точности и удобства использования системы.
▍ ▉ Баланс стоимости и надежности: При соблюдении пороговых значений производительности необходимо найти баланс между стоимостью и надежностью на протяжении всего жизненного цикла. Выбор должен основываться на критичности задачи, которую представляет собой контейнер, и общей стоимости владения.
Рекомендация по продукту: Инновационные решения для мобильных устройств! Интегрированная навигационная система KT-EX8-11 устанавливает отраслевой стандарт благодаря своим фундаментальным преимуществам!
Благодаря своим всесторонним преимуществам в производительности, инерциальная навигация на основе MEMS-технологии постепенно стала ключевой технологией для реализации замкнутого контура «датчик-стабилизация-позиционирование» в капсульных системах. Благодаря непрерывному технологическому совершенствованию и оптимизации системы, инерциальная навигация на основе MEMS-технологии способствует эволюции капсульных систем в сторону уменьшения веса, повышения точности и интеллектуальности, обеспечивая надежную поддержку независимого управления и разнообразного применения высокотехнологичного оборудования.
![[Kaituo·Chenguang] Незаменимый инструмент для специалистов по направленному бурению | Подробное описание применения MEMS-гироскопа + руководство по выбору для всех сценариев: точное бурение без отклонений](https://cdn.cnyandex.com/ii8rkyo/uploads/Незаменимый-инструмент-для-специалистов-по-направленному-бурению-Подробное-описание-применения-MEMS-гироскопа.jpg)

![[Kaituan·Chenguang] Углубленный анализ основных технологий инерциальной навигации MEMS в капсулах](https://cdn.cnyandex.com/ii8rkyo/uploads/Kaituan·Chenguang-Углубленный-анализ-основных-технологий-инерциальной-навигации-MEMS-в-капсулах-1.png)




